Динамическая навигационная хирургия представляет собой современный метод контроля положения имплантата. Процесс начинается с импорта данных конусно- лучевой компьютерной томографии (КЛКТ) в специализированное программное обеспечение. Для реализации хирургического плана и наведения в реальном времени применяют навигационные устройства с оптической системой слежения.
.png) Примером такого оборудования служит прибор MicronTracker (ClaroNav, Торонто, Канада). В его основе лежат стереоскопические датчики, которые обнаруживают и отслеживают специальные маркеры — цели оптического слежения, или сканмаркеры. Эти объекты фиксируются на хирургическом наконечнике и непосредственно на челюсти пациента. Оптическая камера системы непрерывно считывает положение сканмаркеров, а программное обеспечение в реальном времени отображает на экране трёхмерный аватар фрезы в сагиттальной, осевой и корональной проекциях.
Примером такого оборудования служит прибор MicronTracker (ClaroNav, Торонто, Канада). В его основе лежат стереоскопические датчики, которые обнаруживают и отслеживают специальные маркеры — цели оптического слежения, или сканмаркеры. Эти объекты фиксируются на хирургическом наконечнике и непосредственно на челюсти пациента. Оптическая камера системы непрерывно считывает положение сканмаркеров, а программное обеспечение в реальном времени отображает на экране трёхмерный аватар фрезы в сагиттальной, осевой и корональной проекциях.Главное преимущество технологии — возможность интраоперационной коррекции. Хирург контролирует всё вмешательство в режиме реального времени и может мгновенно изменить траекторию или глубину препарирования, чтобы избежать повреждения критических анатомических структур, таких как нижнечелюстной нерв. Именно эта способность адаптироваться в ходе операции дала название системе — динамическая навигационная хирургия. Виртуальная визуализация положения инструмента относительно анатомических структур обеспечивает высочайшую точность и безопасность дентальной имплантации.
Статическая навигационная хирургия: технологии и виды
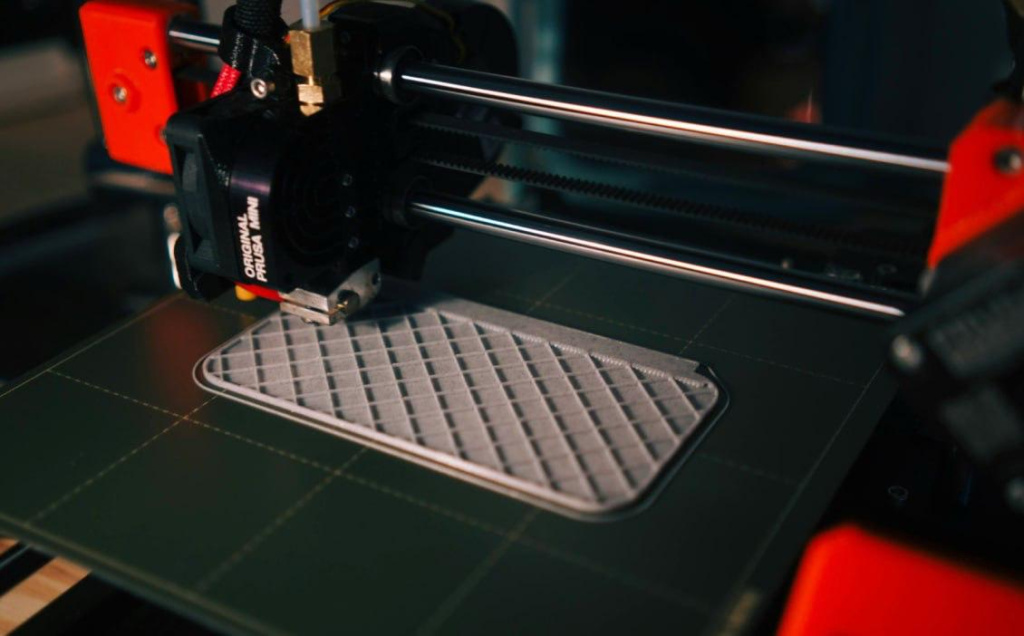
В основе статических навигационных систем лежат иные технологические подходы. Для изготовления хирургических шаблонов здесь применяются методы аддитивного производства, такие как стереолитография (SLA) — разновидность быстрого прототипирования или трёхмерной печати. Этот метод позволяет создавать твёрдые трёхмерные объекты послойным синтезом фотополимерной смолы под воздействием лазера. Полученные модели с высокой точностью воспроизводят анатомию челюстей.
 Наряду с аддитивными технологиями в статических системах используют механическое позиционирование, которое позволяет преобразовать диагностический рентгенологический шаблон в рабочий хирургический шаблон.
Наряду с аддитивными технологиями в статических системах используют механическое позиционирование, которое позволяет преобразовать диагностический рентгенологический шаблон в рабочий хирургический шаблон.Цифровая цепочка: от планирования к шаблону
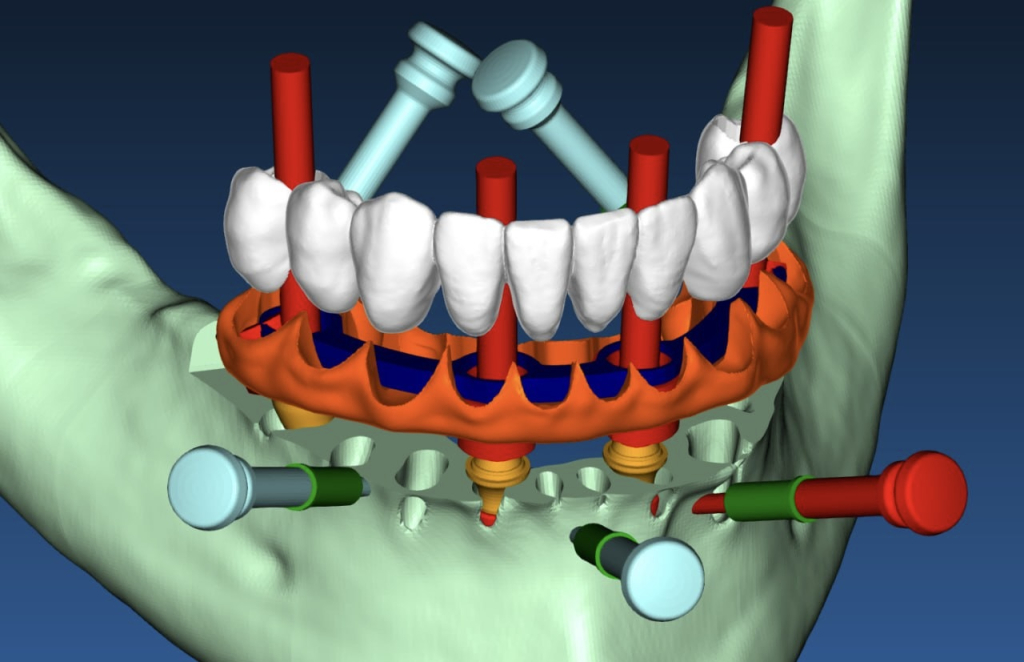
Работа со статической системой начинается с компьютерного моделирования. Для создания виртуального шаблона используют координаты будущих имплантатов (данные пространственного позиционирования). Программное обеспечение, например, интегрированное в coDiagnostiX, генерирует файл в специальном формате для экспорта на устройство трёхмерной печати.
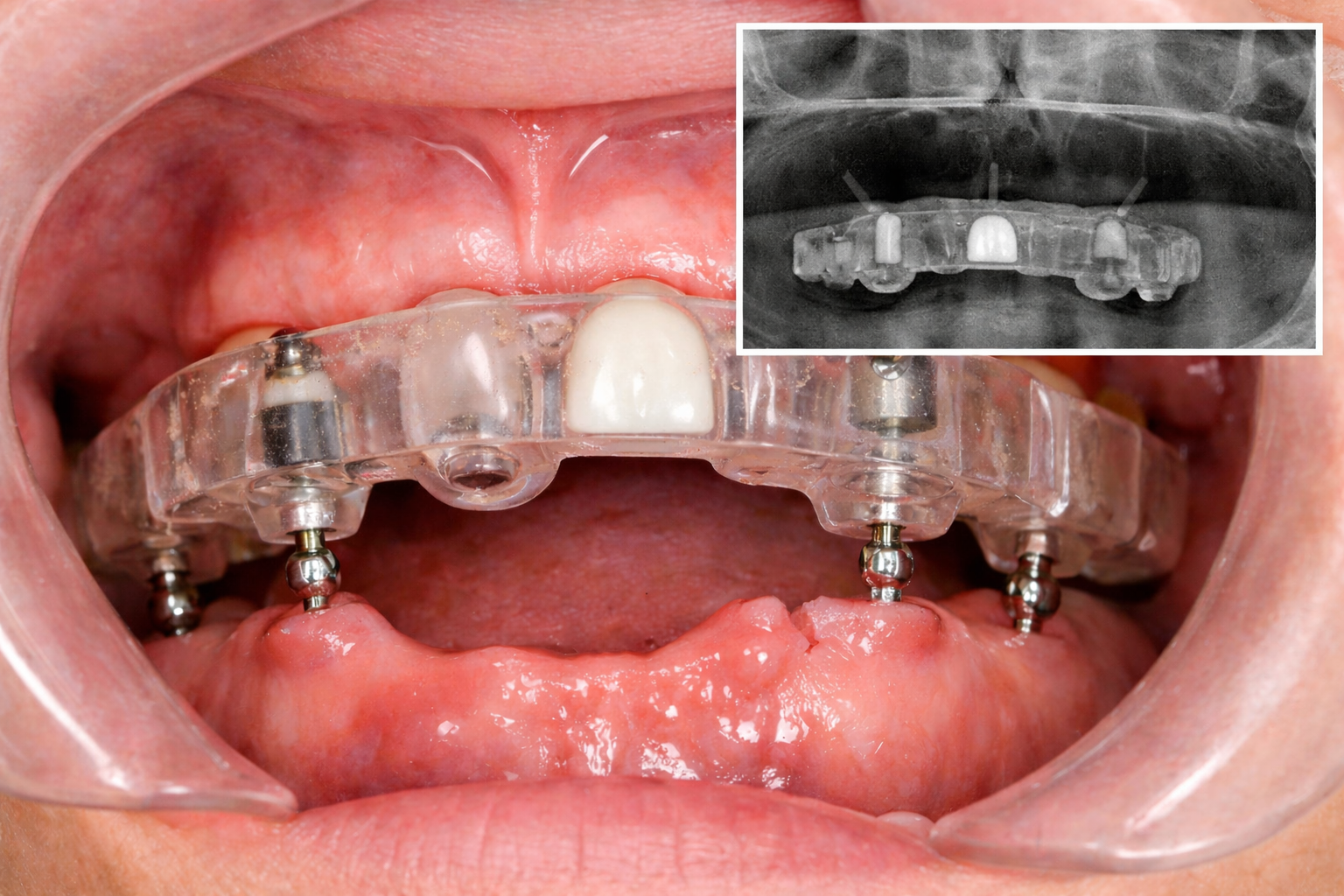
Альтернативным, аналоговым методом является использование аппарата GonyX. В него вручную вводят координаты имплантатов. На основе рабочей гипсовой модели изготавливают два шаблона: рентгенологический (с рентгеноконтрастными коронками, имитирующими будущий протез) и хирургический.
Ключевой этап — перенос цифрового плана в физический шаблон. Рентгенологический шаблон крепится к пластине Templix тремя контрольными штифтами. Устройство GonyX считывает их положение для точной пространственной привязки и переноса данных. После импорта файлов DICOM в ПО для планирования программа создаёт проект для изготовления шаблона. Гипсовая модель и рентгенологический шаблон помещаются в аппарат GonyX с использованием бумажного контрольного шаблона для ориентации.
Координаты каждого имплантата импортируются в GonyX, где для их точного определения используются четыре круговые штифтовые шкалы (обозначаемые А, В, С и D). На основе этих данных аппарат автоматически сверлит в шаблоне точные отверстия под направляющие втулки.
Важно отметить, что данный процесс включает несколько аналоговых, или ручных, этапов, где человеческий фактор может влиять на итоговую точность.
Классификация статических систем
Статические навигационные системы классифицируют по нескольким параметрам:
По типу направляющего механизма:
- Системы полной навигации: имплантат устанавливается строго по шаблону;
- Системы частичной навигации: шаблон используется только для препарирования костного ложа или формирования пилотного отверстия, после чего имплантат устанавливается свободно;
- По количеству шаблонов: использование нескольких сменных шаблонов с втулками разного диаметра или одного универсального шаблона со сменными втулками;
- По контролю глубины: применение фрез со встроенными стопорами или ориентация на визуальные отметки (насечки) на фрезе.
 Показания и оценка точности навигационных систем
Показания и оценка точности навигационных системНавигационные технологии, как статические, так и динамические, особенно показаны в сложных клинических случаях: при дефиците костной ткани или близком расположении важных анатомических образований (нижнечелюстной нерв, верхнечелюстная пазуха). Понимание предельных отклонений для каждой системы критически важно для хирурга.
Точность (Accuracy) и Прецизионность (Precision)
Ключевой момент в оценке — разграничение терминов:
- Точность (Accuracy) — близость результата к заданному, идеальному значению (запланированной позиции имплантата);
- Прецизионность (Precision, воспроизводимость) — близость результатов повторных измерений одного параметра друг к другу.
Данные исследований и сравнение систем
Систематические обзоры показывают, что, несмотря на высокую выживаемость имплантатов при навигационной установке, показатели точности варьируются. Средние отклонения, как правило, клинически приемлемы (около 1.12 мм у входа и 1.39 мм у верхушки), но максимальные отклонения в отдельных случаях могут достигать 4.5 мм и 7.1 мм соответственно.
Сравнительные исследования указывают, что статические системы в лабораторных условиях могут демонстрировать более высокую точность, чем динамические. Однако важно учитывать, что многие данные по статическим системам получены in vitro (на моделях, трупах), где условия идеальны (отличный доступ, неподвижность, отсутствие крови). Большинство же публикаций о динамических системах основаны на клинических исследованиях in vivo.
Современные данные свидетельствуют, что в реальной клинической практике динамическая навигация способна достигать точности, сопоставимой со статическими системами. Важный общий вывод: любая система навигации (статическая или динамическая) превосходит по точности и воспроизводимости свободную (произвольную) установку имплантата.
Кривая обучения и клиническое применение
Внедрение навигационных технологий сопряжено с продолжительной кривой обучения. Хирургам требуется время, чтобы адаптироваться к работе без прямого визуального контроля операционного поля, привыкнув доверять цифровой визуализации на экране. Накопление практического опыта работы с конкретной системой является ключевым фактором для повышения уверенности, эффективности и, как следствие, клинического результата.
*Авторство: Материал статьи подготовлен на основе руководства ITI Treatment Guide, Volume 11: «Цифровые протоколы в дентальной имплантологии» (Quintessence Publishing).