
 В процессе гипсовки моделей в механический артикулятор возможны погрешности, что ведет к образованию преждевременных окклюзионных контактов или окклюзионных препятствий на рабочей либо нерабочей стороне окончательного протеза.
В процессе гипсовки моделей в механический артикулятор возможны погрешности, что ведет к образованию преждевременных окклюзионных контактов или окклюзионных препятствий на рабочей либо нерабочей стороне окончательного протеза.
 Такие погрешности часто связаны с особенностями регистрационной массы. К тому же небольшие пузырьки на поверхности гипсовой модели еще больше искажают межбугорковые контакты. Чтобы минимизировать погрешности, зубной техник должен внимательно проверить качество моделей и точность регистрации соотношения челюстей.
Некорректное воспроизведение терминальной шарнирной оси в артикуляторе приводит к неправильному моделированию окклюзионных поверхностей и формированию окклюзионных препятствий после фиксации окончательных реставраций (Shillingburg et al., 1981; Maveli et al., 2015).
Такие погрешности часто связаны с особенностями регистрационной массы. К тому же небольшие пузырьки на поверхности гипсовой модели еще больше искажают межбугорковые контакты. Чтобы минимизировать погрешности, зубной техник должен внимательно проверить качество моделей и точность регистрации соотношения челюстей.
Некорректное воспроизведение терминальной шарнирной оси в артикуляторе приводит к неправильному моделированию окклюзионных поверхностей и формированию окклюзионных препятствий после фиксации окончательных реставраций (Shillingburg et al., 1981; Maveli et al., 2015). Цифровая регистрация окклюзионных контактов с помощью внутриротового сканирования выгодно отличается от традиционных методов тем, что не требует использования оттискных масс, что повышает точность результатов.
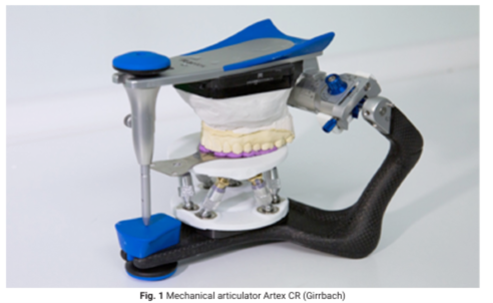
 При необходимости достижения высокого эстетического результата предпочтительнее создание облицованных реставраций. В таких случаях механический артикулятор помогает оценить точность всех мануальных этапов. Для этого необходимо ПО для компьютерного моделирования, которое поддерживает интеграцию артикуляторов III и IV классов.
При необходимости достижения высокого эстетического результата предпочтительнее создание облицованных реставраций. В таких случаях механический артикулятор помогает оценить точность всех мануальных этапов. Для этого необходимо ПО для компьютерного моделирования, которое поддерживает интеграцию артикуляторов III и IV классов.В заключение, следует отметить, что использование механических артикуляторов при моделировании жевательных движений имеет свои ограничения. Погрешности, возникающие в процессе гипсовки моделей, могут привести к формированию преждевременных окклюзионных контактов или окклюзионных препятствий на окончательном протезе. Таким образом, для достижения более точных результатов и учета индивидуальных особенностей пациента, необходимо развивать более совершенные методы моделирования жевательных движений в стоматологии.
Источник: Цифровые протоколы в дентальной имплантологии. Авторы: Г. Галлуччи, К. Эванс, А. Тамасеб. Редакторы: Д. Висмайер, С. Бартер, Н. Донос. Переводчики: Вероника Вельт, Антонина Клещельская

